Profil
Mit dem Kørsel-Projekt bieten wir Studierenden, Schülerinnen und Schülern sowie allen Roboter-Interessierten eine einfache und kostengünstige Roboterplattform zum Nachbauen und erweitern an.
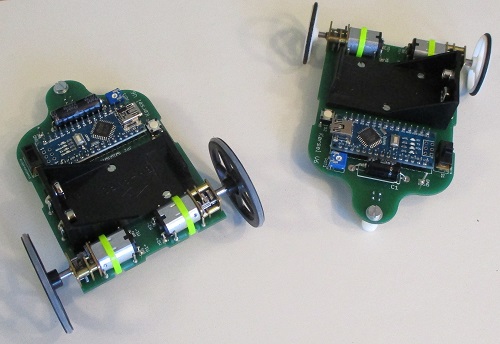
Beim Kørsel arbeitet ein Arduino Nano. Die Platine ist gleichzeitig auch das Chassis, auf welchem die Motoren und andere Komponenten verbaut sind. Eine Erweiterung mittels verschiedener Shields (Aufsteckplatinen) ist möglich.
In einer einfachen "analogen Version" ist eine minimalistische elektronische Schaltung die Steuereinheit, um welche dann die Mechanik eines Linienfolgers gebaut werden kann.
![]()
Das Projekt läuft unter der Creative Commons Lizenz BY-NC-SA.
Namensnennung - Nicht-kommerziell - Weitergabe unter gleichen Bedingungen
Kørsel mit Arduino

Einführender Text
Schaltplan und Board (EAGLE)
Downloads
- Schaltplan im pdf-Format
- Bauteile mit Bezugsquellen und Beschreibung.
- Anleitung zum Bau des Korsels
- Einfaches Programm, mit welchem der Kørsel einer Linie (schwarz-weiß-Übergang) folgt.
Analoge Version
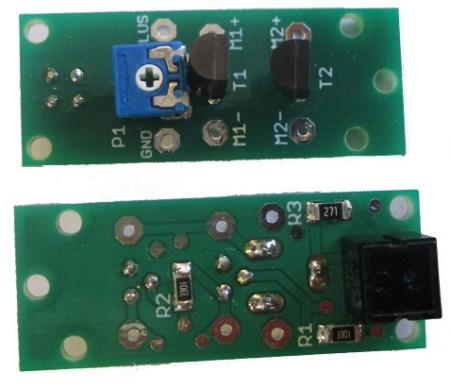
Die analogen Version
ist eine minimalistische elektronische Schaltung mit nur sieben Bauteilen.
Die Platine - Oberseite und Unterseite nach dem Bestücken.
(Abmessungen ca. 38 mm x 15 mm (1,5 inch x 0,6 inch)).
Der Schaltplan
(siehe auch Downloadbereich am Seitenende)
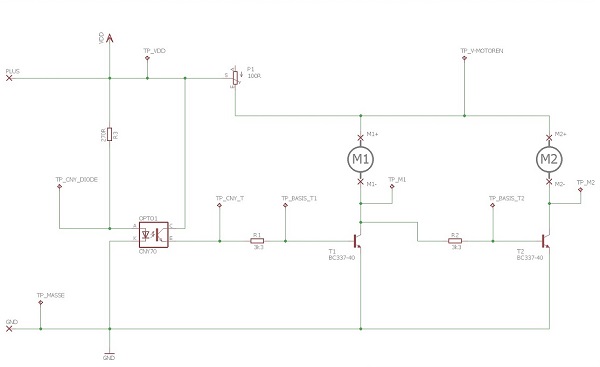
Die Schaltzeichen TP_xxx sind Testpunkte, die in der gefertigten Platine zum Messen der Spannungen mittels Multimeter oder Oszilloskope vorgesehen sind.
Der Poti P1 - "in der Versorgung für die Motoren verbaut" - ist für die "Anpassung" der Spannung vorgesehen. Hintergrund ist, dass die Platine mit verschiedenen Motoren und Batterien/Akkus funktionieren soll. Die "Poti-Methode" ist nicht ganz die eleganteste Art der "Spannungsanpassung". Funktioniert in dieser einfachen Platine recht gut und ist einfach zu realisieren.
Funktionsweise
Die Reflektionslichtschranke CNY 70 ist über einer weißen bzw. hellen Oberfläche:
- Das Licht der IR-Diode (des CNY 70) wird reflektiert.
- Der IR-Transistor (des CNY 70) ist duchgeschalten.
- Über Widerstand R1 fließt Strom, Transistor T1 ist durchgeschalten.
- Potential am Kollektor von T1 ist ca. 0,3 Volt.
- Motor 1 läuft.
- Durch das Potential von "nur" 0,3 Volt kann über R2 kein Strom zu T2 fließen.
- Motor 2 läuft nicht.
Die Reflektionslichtschranke CNY 70 ist über einer schwarzen bzw. dunklen Oberfläche:
- Das Licht der IR-Diode (des CNY 70) wird nicht oder wenig reflektiert.
- Der IR-Transistor (des CNY 70) ist nicht duchgeschalten.
- Über den Widerstand R1 fließt kein Strom, Transistor T1 ist nicht geschalten.
- Motor 1 läuft nicht.
- Über die Wicklung von Motor 1 und R2 fließt nun ein geringer Strom, der zum Schalten von T2 ausreicht. Die Wicklungen von Motor 1 verhalten sich hier wie ein Widerstand mit wenigen Ohm.
- Motor 2 läuft.
Downloads
- Schaltplan als pdf-Datei
- Schaltplan als Bilddatei (jpg)
Geschichte des Projekts
Entstanden ist die Idee zum Kørsel-Projekt im Sommersemester 2010 an der Hochschule Ravensburg Weingarten in der Fakultät Elektrotechnik und Informatik. Inspiriert dazu wurden wir durch verschiedene Roboterplattformen und durch die Formel SPURT an der Uni-Rostock.
Wir wollten für unsere Studierenden in den ersten Semestern, für Schüler an unseren Partnerschulen sowie für alle Roboter-Interessierten eine einfache und kostengünstige Roboterplattform entwickeln. Diese sollte in der einfachsten Version einer Linie folgen können, nicht mehr als 15€ kosten, einen populären µController haben und bei Bedarf ausbaubar sein. Alle Bauteile sollten leicht zu beschaffen sein und natürlich günstig im Preis.
Wir entwickelten dazu das HD-Kørsel. Hier ist die Leiterplatte auch gleichzeitig das Chassis. Für alle, die nun eine eigene Chassis-Konstrukion bevorzugen, haben wir die elektronische Schaltung des HD-Kørsels sehr kompakt auf eine kleine Steuerplatine "gepackt". So kann man um die Steuerplatine "herum" ein eigenes Kørsel bauen.
Anfang 2014 haben wir dann die Programmierung auf ARDUINO umgestellt und dazu auch eine neue Hardware etwickelt, die nun einen ATmega328 als Controller besitzt und mittels der ARDUINO-Umgebung sehr leicht zu programmieren ist. Seit 2016 verwenden einen kompletten Arduino Nano auf einer weiterentwickelten Platine.
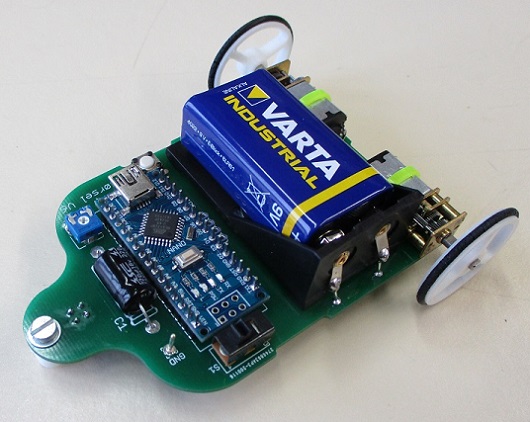
Seit Anfang 2020 gibt es nun die neuste Version mit zwei N20 Getriebemotoren und neuer, noch kompakteren Platine.
In der einfachsten Form sind die Kørsels Kantenfolger. Das heißt, der Sensor erkennt entweder die schwarze Linie oder den hellen Untergrund. Das Kørsels fährt dann entlang dem Übergang von Linie zum Untergrund. Erweiterungen sind mittels Aufsteckplatinen (Shields) problemlos möglich.
Für die Schaltplangestaltung verwenden wir die Freeware-Version des Schaltplan-Editors EAGLE (vormals CadSoft nun Autodesk). Die Freeware-Version reicht für unsere Zwecke völlig aus.
Bei der Namensfindung haben wir uns ein Wort aus dem Dänischen ausgeliehen. Kørsel ist dort ein allgemeiner Begriff für Fahrzeug.
Kontakt & Personen
Ansprechpartner
