
Profile
Wouldn't that be nice: Enjoying a party with friends in the evening and the apartment tidies up all by itself overnight? At Robocup@Home you can help make this vision a reality!
Whether it's clearing the table, vacuuming, washing up or doing the laundry, everything is done by the friendly helper made of plastic and metal. The teams in the Robocup@Home are getting closer to this goal every year - even if there is still a lot of work to be done before the iRobot is finished.
The @Home league has been held in the Robocup since 2006. The goal: to create an assistant that can independently find intelligent solutions to any problem in environments with changing requirements - a task that even humans are sometimes overwhelmed by. The conditions for the competition are correspondingly demanding.
Every year there is a new playing field and different tasks. The teams only find out the final conditions for the competition arena and the objects that play a role in the tasks two days before the start of the competition. This prevents the robots from being adapted too much to the respective problems in advance.
Robocup@Home therefore takes a different approach to the soccer leagues: There, both the playing field and the tasks are precisely specified, but the very complex moves have to be dynamically adapted to the opponent's behavior. In the @Home league, on the other hand, the playing field corresponds to a small apartment with several rooms and random furnishings. The tasks are randomly generated in the advanced competition parts and may even contain errors that the robot must recognize independently. However, the individual actions are then - at least on the surface - simple and clearly defined, such as: "Find a bag of potato chips in the kitchen and take them to the table in the dining room".
More info on the @Home league: https://www.heise.de/ct/artikel/Die-alltaeglichen-Probleme-eines-Roboter-Butlers-3738415.html
Rulebook of the last championship: https://athome.robocup.org/wp-content/uploads/2019_rulebook.pdf
Was wir machen?
Egal ob Tischabräumen, Staubsaugen, Abspülen oder Wäschewaschen, alles wird von dem netten Helfer aus Kunststoff und Metall erledigt. Die Teams im Robocup@Home kommen diesem Ziel jedes Jahr näher – auch wenn es bis zum fertigen iRobot noch ein gutes Stück Arbeit ist.
Seit 2006 wird die @Home Liga im Robocup ausgetragen. Das Ziel: Einen Assistenten erschaffen, der in Umgebungen mit wechselnden Anforderungen selbständig intelligente Lösungen für beliebige Probleme findet – eine Aufgabe, mit der selbst Menschen zeitweise überfordert sind. Entsprechend anspruchsvoll sind die Rahmenbedingungen für den Wettkampf.
Jedes Jahr gibt es ein neues Spielfeld und veränderte Aufgaben. Die Teams erfahren erst zwei Tage vor Wettkampfbeginn die endgültigen Rahmenbedingungen für die Wettkampfarena und die Gegenstände, die in den Aufgaben eine Rolle spielen. Dadurch wird verhindert, dass die Roboter im Vorfeld zu stark an die jeweiligen Problemstellungen angepasst werden können.
Robocup@Home verfolgt damit einen anderen Ansatz als die Soccer Ligen: Dort sind zwar sowohl das Spielfeld als auch die Aufgaben genau vorgegeben, doch die sehr komplexen Spielzüge müssen dynamisch an das Verhalten des Gegners angepasst werden. In der @Home Liga entspricht das Spielfeld dagegen einer kleinen Wohnung mit mehreren Räumen und beliebigen Einrichtungsgegenständen. Die Aufgaben werden in den fortgeschrittenen Wettkampfteilen zufällig generiert und sie dürfen sogar Fehler enthalten, die der Roboter selbständig erkennen muss. Dafür sind die einzelnen Aktionen anschließend – zumindest oberflächlich betrachtet – simpel und klar definiert, etwa: “Finde eine Tüte Chips in der Küche und bringe sie zum Tisch im Esszimmer”.
Mehr infos zur @Home Liga: https://www.heise.de/ct/artikel/Die-alltaeglichen-Probleme-eines-Roboter-Butlers-3738415.html
Rulebook der letzten Meisterschaft: https://athome.robocup.org/wp-content/uploads/2019_rulebook.pdf
News
News of this institution

Press release
RWU team in the final of the RoboCup German Open
The RWU RoboCup team took part in the RoboCup German Open 2026 in Cologne in March with the robots "Tiago" and "Kate". They took third place in the final.

Press release
RWU robotics team finishes at third place at the German Open
The RoboCup is the world's largest and most important competition for intelligent robots. Last April, the RWU team reached the third place at the German Open and is now preparing for the world championship.
Software / Publications
Software
All published software packages can be viewed at https://github.com/iki-wgt. Further publications are planned and are currently under review.
Publications
All publications of the Institute for Artificial Intelligence can be found at https://forschung.rwu.de/institute/iki.
Hardware
Roll low cost DIY intelligent walker
- Platform Dietz TAiMA wheeled walker
- Wheel hub Motors and Battery: From an ordinary 8 inch hoverboard
- Motor controller: Odrive V3.5 from Odriverobotics -> https://github.com/neomanic/odrive_ros
- Raspberry Pi 4
- 3D Sensor: Orbbec Astra
- IR Sensors: SHARP (2y0a02, 2y0a21, 0a41sk)
If you are interested, please contact Benjamin Kathan (kathanbe@rwu.de)
Sponsors
Become a sponsor?
If you would like to support our team financially or with material donations, please contact Benjamin Stähle at staehle@rwu.de at any time.
Competition archive
Here you will find an excerpt of the competitions in which our teams have successfully participated:

World Cup 2024 - Eindhoven
- 8th place

German Open 2023 - Kassel
- 3rd place

World Cup 2023 - Bordeaux
- 8th place
- Open Challange Award

European Robotics League 2022 - Oldenburg
1st place

World Cup 2021 - Virtual
- 10th place
- Best Poster Award

German Open 2019 - Magdeburg
5th place

German Open 2018 - Magdeburg
5th place

German Open 2017 - Magdeburg
5th place and participation in the final
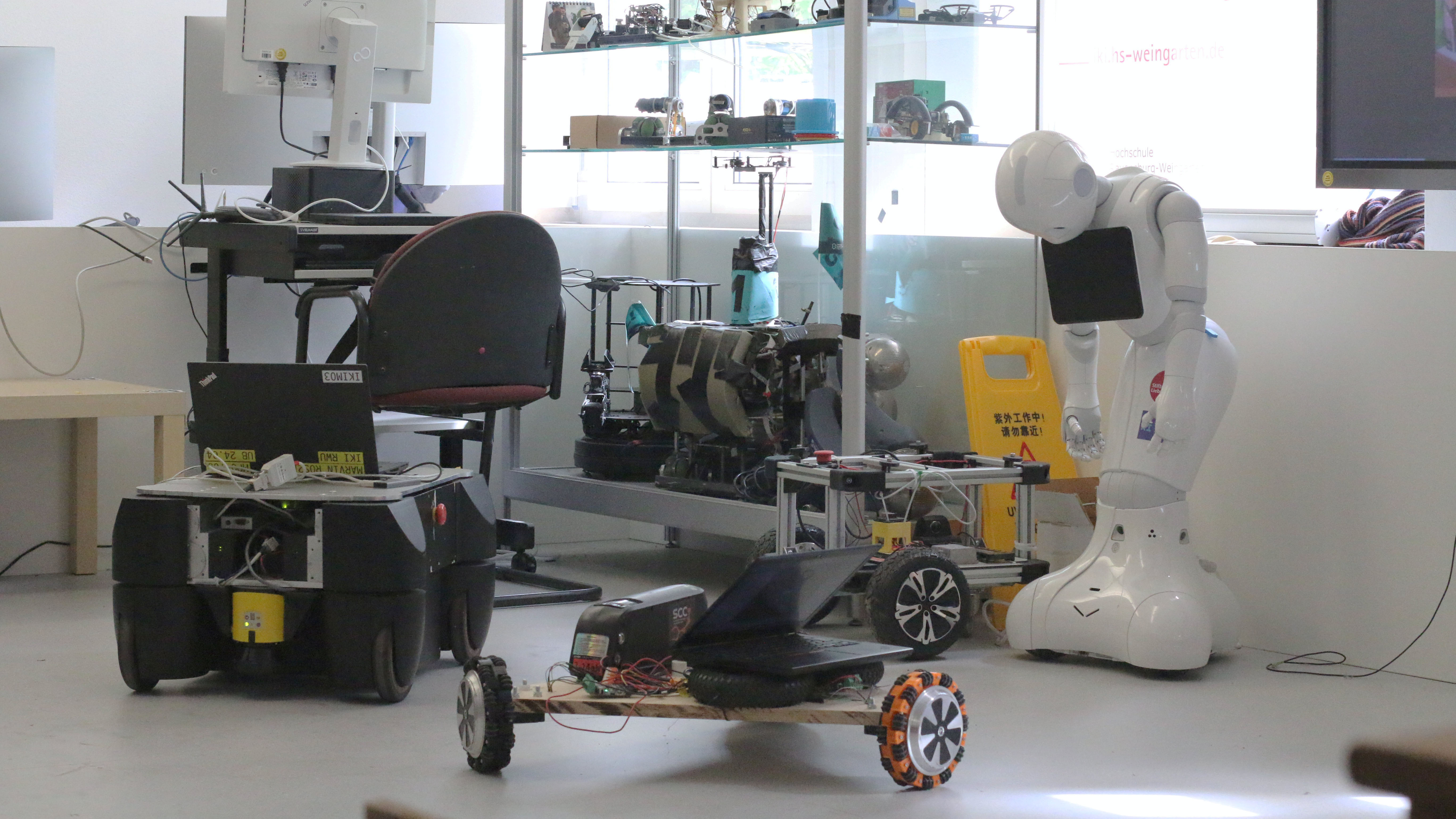
Our robots
Here you will find our robots, which we have used at current and past competitions:

Kurt
Tech Details:
- Tiago by PAL Robotics
- 7 DOF arm
- Differential Drive
- 1 PC

Marvin
Tech Details:
- Base: Neobotix MPO 700
- Kinova JACO 6 DOF arm
- 2 PCs

Kate
Tech Details:
- Base: Pioneer
- Katana 5 DOF arm
- 2 PCs
Photo gallery
Summer Festival 2026
The annual summer festival hosted by the Robocup team on campus took place on May 21th. Visitors had the chance to view the team's progress and preparation for the upcoming world championship during robot showcases as well as being able to try out the machines' skill for themselves. Food and drink was also well taken care of.







Contact & People
General contact details
| Postal address |
RWU Hochschule Ravensburg-Weingarten University of Applied Sciences Robocup Team @Home League P.O. Box 30 22
88216 Weingarten Germany |
|---|
Contact person
